
Descripción
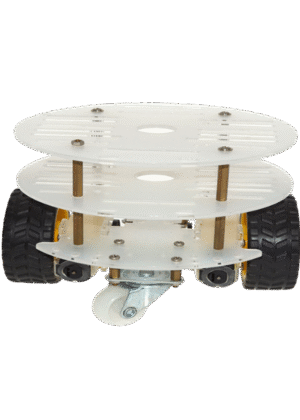
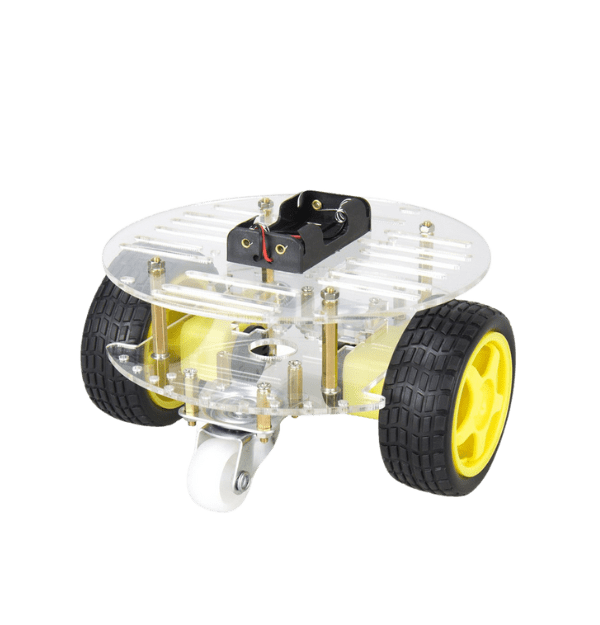
El OKY5026 2WD es un kit de chasis para coche robot inteligente, diseñado como una plataforma robusta y versátil para proyectos de robótica y aprendizaje de programación. Ideal para entusiastas del bricolaje y estudiantes, este kit proporciona la base mecánica para construir robots móviles controlados por microcontroladores populares como Arduino. Su estructura de doble capa permite una fácil integración de componentes electrónicos, sensores y módulos, fomentando la creatividad y la experimentación en diversos proyectos robóticos.
| Característica | Descripción detallada |
|---|---|
| Tipo de Chasis | Coche robot 2WD (Two-Wheel Drive) |
| Material del Chasis | Láminas de acrílico transparente cortadas con láser, doble capa |
| Motores Incluidos | 2 motorreductores de corriente continua (DC) con ejes dobles |
| Ruedas | 2 ruedas de tracción de goma (diámetro 66 mm) y 2 ruedas universales (caster) de metal para soporte y maniobrabilidad |
| Codificadores de Velocidad | Incluye 2 discos codificadores perforados para acoplar a los ejes de los motores, permitiendo la medición de distancia y velocidad mediante sensores ópticos (no incluidos). |
| Soporte de Batería | Contenedor de plástico para 2 baterías AA (tamaño “AA”, no incluidas), con terminales de conexión accesibles para alimentar el sistema. |
| Compatibilidad | Diseñado con orificios de montaje estándar para ser compatible con microcontroladores populares como Arduino (UNO, Mega), Raspberry Pi, ESP32, etc., así como con otros módulos electrónicos y sensores. |
| Dimensiones Generales (Chasis) | Aproximadamente 15 cm (largo) x 14 cm (ancho) x 11.5 cm (alto, incluyendo ruedas y separación de capas). |
| Voltaje de Operación (Motores) | DC 3V a 6V (voltaje nominal recomendado de 6V para rendimiento óptimo). |
| Corriente (Motores) | 120 mA (sin carga) a 6V. |
| Relación de Reducción (Motores) | 48:1 (significa que el motor gira 48 veces por cada vuelta del eje de salida). |
| RPM (con neumático) | Aproximadamente 240 RPM (revoluciones por minuto) a 6V con la rueda de 66 mm. |
| Diámetro del Neumático | 66 mm. |
| Componentes Incluidos | 2x Placas base de chasis de acrílico, 2x Ruedas de tracción de goma, 2x Motorreductores DC con ejes dobles, 2x Discos codificadores de velocidad, 4x Soportes de motor de acrílico, 2x Ruedas universales de metal, 4x Columnas de cobre roscadas de 30mm (separadores), 4x Tornillos de cabeza redonda M3 de 30mm, 8x Pilares de doble paso M3 de 8mm, 8x Tornillos de cabeza redonda M3 de 16mm, 4x Tornillos de cabeza redonda M3 de 8mm, 1x Contenedor de batería para 2x AA, y un juego completo de tornillos y tuercas M3 necesarios para el ensamblaje. |
Usos
- Plataforma de Desarrollo Robótico: Es una base sólida para construir cualquier tipo de robot móvil. Puedes añadir un microcontrolador (como Arduino, Raspberry Pi, ESP32), sensores (ultrasónicos, infrarrojos, de color), módulos de comunicación (Bluetooth, Wi-Fi) y controladores de motor para crear robots con funcionalidades específicas.
- Proyectos Educativos STEM (Ciencia, Tecnología, Ingeniería y Matemáticas): Es una herramienta excelente para la enseñanza y el aprendizaje. Permite a estudiantes de todas las edades comprender los principios básicos de la robótica, la electrónica, la mecánica y la programación de una manera práctica y divertida. Es ideal para talleres, cursos introductorios y proyectos escolares.
- Robot Seguidor de Líneas: Al integrar sensores de línea en la parte inferior, el chasis puede programarse para detectar y seguir una línea negra en una superficie clara, una aplicación clásica en la robótica básica.
- Robot Evita-Obstáculos: Con la adición de sensores de distancia (como el sensor ultrasónico HC-SR04), el robot puede detectar obstáculos en su camino y cambiar de dirección automáticamente para evitarlos.
- Robots de Control Remoto: Si se le añade un módulo de comunicación inalámbrica (Bluetooth, Wi-Fi o RF) y un controlador de motor, el robot puede ser controlado a distancia mediante un smartphone, una tablet o un control remoto dedicado.
- Robots de Medición de Distancia y Velocidad (Odometría): Gracias a los codificadores de velocidad incluidos, es posible programar el robot para medir la distancia recorrida y su velocidad, lo que es fundamental para la navegación autónoma y el mapeo.
- Plataforma para Experimentación y Prototipado: Su diseño de doble capa y los múltiples orificios de montaje hacen que sea fácil añadir y probar diferentes módulos electrónicos y sensores, lo que lo convierte en una plataforma ideal para el prototipado rápido de ideas.
Beneficios
- Fácil Montaje: El kit está diseñado para un ensamblaje sencillo, con piezas precortadas y orificios pre-perforados. Esto reduce la curva de aprendizaje y permite a los usuarios ponerlo en marcha rápidamente.
- Ideal para Bricolaje (DIY): Fomenta la creatividad y la personalización. Los usuarios pueden modificar la estructura, añadir nuevos componentes y adaptar el robot a sus necesidades específicas, lo que es esencial en proyectos de “hazlo tú mismo”.
- Versatilidad y Flexibilidad: Gracias a su diseño modular y la compatibilidad con una amplia gama de componentes, este chasis puede ser la base para innumerables tipos de robots y proyectos. Puedes cambiar su función simplemente modificando la programación y añadiendo o quitando sensores.
- Estímulo al Aprendizaje Práctico: Al ser un kit físico, proporciona una experiencia de aprendizaje práctica e interactiva. Los usuarios no solo aprenden teoría, sino que también desarrollan habilidades en electrónica, mecánica, programación y resolución de problemas.
- Rentabilidad: Es una solución económica para iniciarse en el mundo de la robótica. Ofrece una base sólida a un costo accesible, permitiendo a los usuarios invertir más en los componentes electrónicos que necesiten.
- Componentes Mecánicos Completos: El kit incluye casi todos los elementos mecánicos necesarios para construir el chasis rodante, lo que simplifica el proceso de adquisición de piezas y permite a los usuarios centrarse en la lógica y la programación del robot.
- Robusto y Duradero: El chasis de acrílico es resistente y ligero, proporcionando una estructura estable para los componentes y soportando el uso regular en diferentes entornos de aprendizaje.